业内有一种说法:“机器人是自动化的‘最后一公里’,灵巧手是机器人‘最后一厘米’。”
今年,宇树科技发布了Unitree Dex5灵巧手,具备单手20自由度,能柔顺丝滑反向驱动,单手94个灵敏触点,演示了拿抛水果、打扑克、玩魔方、翻书、手指舞等动作,展现出较强的灵活性与操作能力。
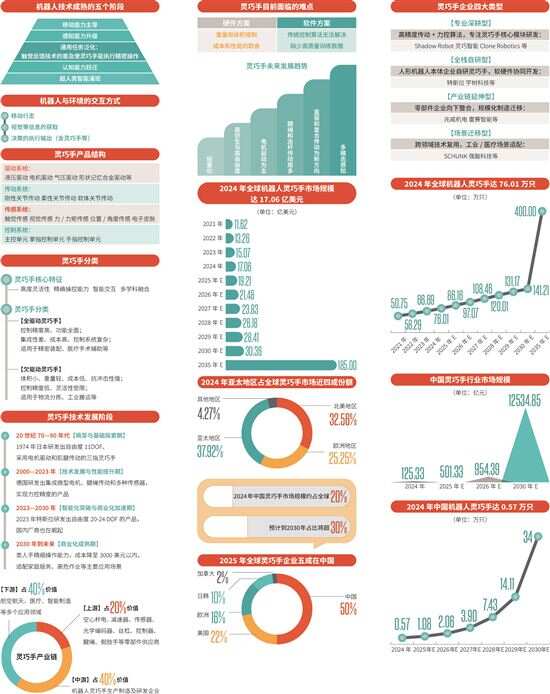
随着人形机器人逐步量产,作为人形机器人关键执行部件的灵巧手有望迎来规模化发展,并率先迎来产业化落地。数据显示,2024—2025年,中国灵巧手行业市场规模由125.33亿元增长至501.33亿元,其间年复合增长率300.00%。这一增长预期为投资者描绘了广阔的市场前景,进一步推动了资本的积极布局。2025年全球灵巧手企业里,中国企业占了一半。
■策划:新快报记者 罗韵
■采写:新快报记者 罗韵
■制图:廖木兴
1
什么是灵巧手?
人形机器人身上最贵的零部件
灵巧手以人手的结构和功能为模仿对象,是机器人实现精细操作的基础,其需要完成抓、握、捏、拧、旋转等不同动作,以满足多元化的场景需求。灵巧手是机器人的核心执行末端,也是人形机器人拟人化的核心标志。
灵巧手也是人形机器人成本占比最高的零部件。目前灵巧手价格占人形机器人整机成本的20%—30%,是占比最高的零部件。作为人形机器人最精密的结构,其一直被认为是人形机器人落地的关键,国内外玩家众多、产业复杂。
早期的工业机器人通过2-3个手指的夹爪进行操作,虽具有成本低、效率高的优势,但通用性差。而人形机器人的操作对象具有不确定性,需要高度的灵活性,模拟人的动作来完成。而人类日常80%的活动都是直接或间接通过手部来完成。因此,未来,人形机器人迭代方向和提供的价值,将主要通过灵巧手展现其柔性和协同能力。
灵巧手是人形机器人和外界交互的桥梁,人形机器人的核心能力是泛化和学习能力,而灵巧手是体现这种泛化性的核心,灵巧手自由度算法和技术的发展,也是人形机器人应用落地的关键。
作为机器人的手部末端执行器,从外形上、驱动方式上和传动方式上,分为多种类型:
从外形来看,可分为抓夹和仿生人手。抓取式通常为2指或3指,可以进行简单的开合动作,完成简单任务如抓取等,是最早的人形机器人的手;仿生式灵巧手外形更贴近人类手部,目标则是实现类人手的复杂任务。
从驱动方式来看,主要有电机驱动、液压/气压驱动和人工肌肉驱动。
从传动方式来看,就控制弯曲运动来分类,可以分为齿轮、连杆传动和肌腱传动3种。